






多电平MMC变流控制系统YXPHM-MMC500
YXPHM系列采用基于模型设计的理念,脱胎于研旭成熟产品光伏并网逆变器与风机变流器等成熟产品,又结合了研旭多年的模块化组件与开放式平台研发经验,对该拓扑结构与驱动电路、传感器电路、信号处理电路进一步集成,同时提供实际控制器接口、快速原型控制器结构与实际控制器模块,为用户提供性价比更好的模块化产品。
关键词:
所属分类:
开放式智能微电网系统
解决方案
新能源微电网平台
联系我们
方案介绍
一、概述YXPHM系列功率模块简介
南京研旭公司最新研发推出了YXPHM系列工业级电力电子功率模块,YXPHM系列模块是面向高校实验室、科研院所以及成品电力电子制造厂商的系列功率拓扑模块。具备稳定的可靠性和良好的扩展性,种类丰富,囊括了现今主流的电力电子拓扑结构。外壳采用透明的亚克力板材,美观实用,用户可以方便观察内部的硬件结构,简洁的输入输出设计,减去用户对模块中间环节的困扰,让用户更专注的投入到核心研发中。
YXPHM系列采用基于模型设计的理念,脱胎于研旭成熟产品光伏并网逆变器与风机变流器等成熟产品,又结合了研旭多年的模块化组件与开放式平台研发经验,对该拓扑结构与驱动电路、传感器电路、信号处理电路进一步集成,同时提供实际控制器接口、快速原型控制器结构与实际控制器模块,为用户提供性价比更好的模块化产品。
二、YXPHM-MMCFB01全桥模块
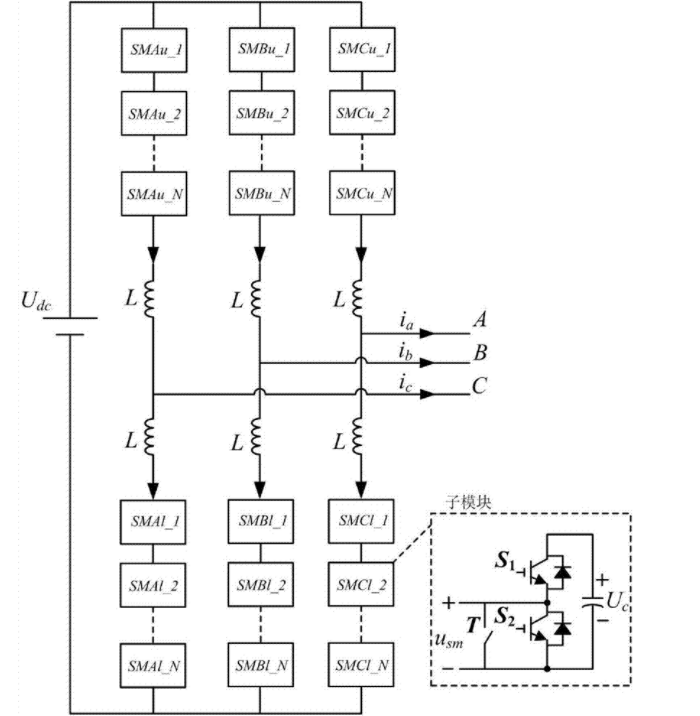
模块化多电平变换器(modular multilevel converter,MMC)是级联型多电平换流器中的一种新型结构,在中高压应用领域具有很大的优势。与目前主要的二极管钳位型等多电平拓扑相比,MMC 可以用在电平数很高的情况下,并且损耗小、输出谐波小、冗余性好。相比于级联 H 桥结构,MMC 中的直流母线可避免电容分散而引起的中频变压器数目较多的问题。MMC 每个子模块结构简单,控制相对容易,可以无限拓展。现阶段 MMC 在高电压、大电流应用领域已有直流输电的工程实例。
相比传统的两电平、三电平变换器,MMC采用子模块级联的方式取代了IGBT器件的直接串联,不存在IGBT的动态均压问题,安装维护容易,易于扩大容量。而相比CHB,MMC省去了移相变压器,使子模块数目与承载功率不再受限制,通过增加子模块数目可灵活地扩展其电压和功率等级。
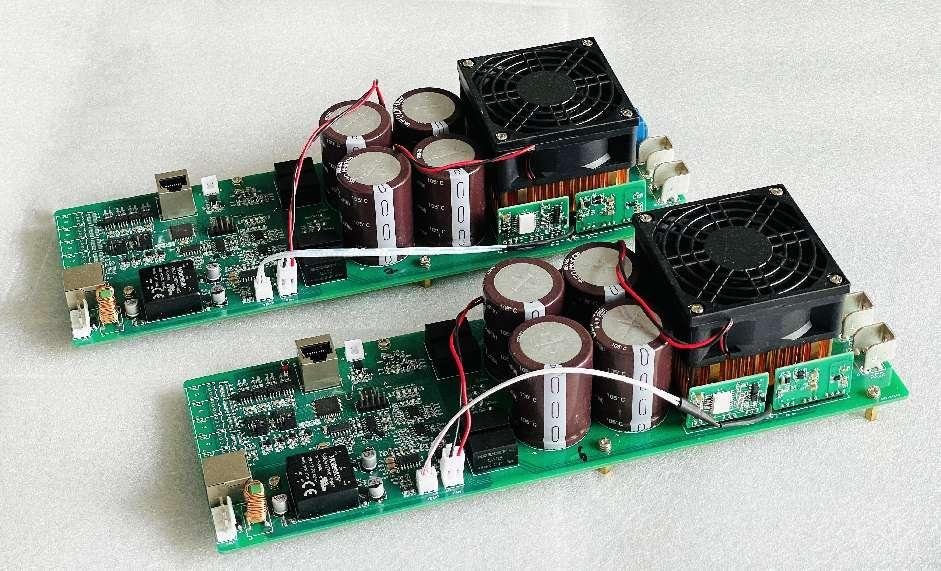
YXPHM-MMCFB01模块拓扑
上图主电路拓扑为电路拓扑架构,功率开关器件采用英飞凌公司的IKW50N60DTP功率管。

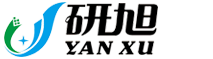
YXPHM-MMCFB01模块实物图
三、多电平MMC变流控制系统
系统参数:
1.最大功率15kW,最大电流25A;
2.交流电压380V,直流电压200V-800V;
3.每相可单独运行,每个桥臂含子模块个数为 N=4,每相共2N个子模块,单相共计4N个模块,三相共计6N个模块;
4.单个模块最高耐压650VDC,最大电流25A;
5.模块可选择半桥/全桥拓扑来使用;
6.模块内部集成了驱动及采样电路;
7.模块板载硬件、软件双重保护,过压、过流保护;
8.子模块为插拔式,配套3U机箱,方便组柜,美观大方;
9.子模块电容和桥臂电感的取值可以灵活调整;关键测量点引出;
10.模块能输出母线电压值、交流侧电流值,FB故障信号;
11.LED灯指示电源、运行、故障等状态。
12.开放功率硬件原理图,硬件编程接口
拓扑结构:
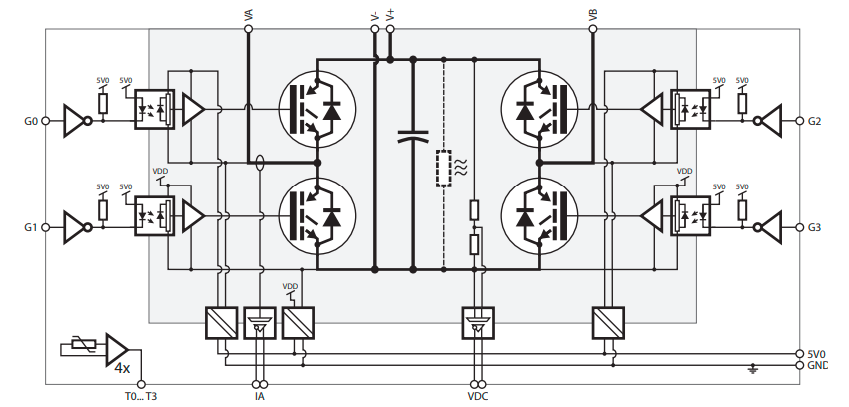
实物图:

一、MMC系统控制模型详解
研旭YXPHM-MMC500多电平MMC实时变流控制系统MMC子模块、研旭半实物仿真机(RCP6000)和实时仿真模型组成,以下对研旭MMC实时仿真模型各个组成部分及其控制模块作详细阐述。
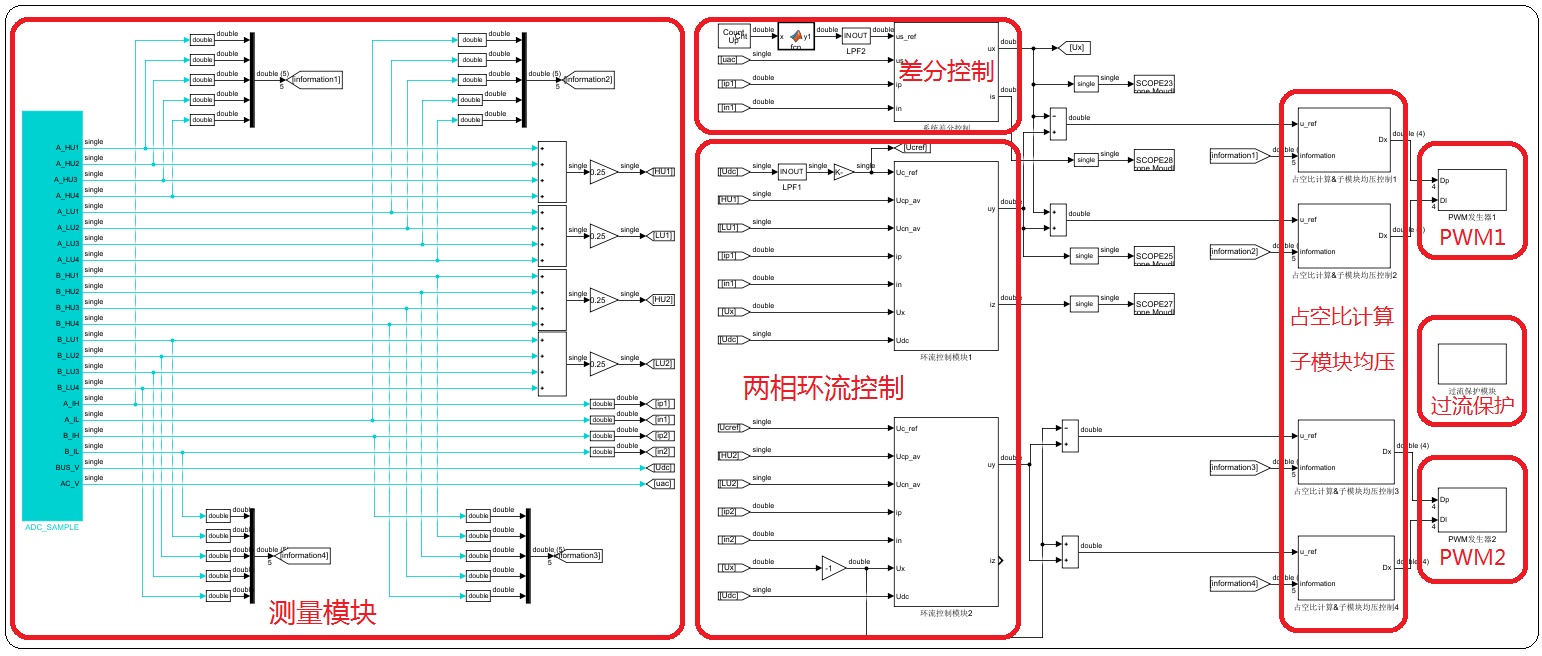
图1 MMC两相控制模型结构
研旭模块化多电平(MMC)两相控制模型如图1所示,其中包括电气参数测量模块、系统差分控制模块、两相环流控制模块、占空比及桥臂子模块均压控制模块、脉宽调制(PWM)波波发生器和过流保护模块组成。电气参数测量模块实时读取研旭RCP仿真系统的AD转换器数值,并将其转换成相应的物理参数为MMC控制模型提供反馈数据和监测数据;系统差分控制模块根据交流电压的给定值和输出反馈值对系统的输出电压和电流实时控制;两相环流控制包括两个环流控制模块,环流控制模块根据一相上、下桥臂的电压和电流反馈值实现上、下桥臂子模块电压控制和上、下桥臂电压的均衡控制;占空比计算和桥臂子模块均压控制模块根据桥臂电压指令和桥臂电气参数反馈值对桥臂各子模块电压进行排序和占空比计算;PWM波发生器根据上、下桥臂的占空比产生上、下桥臂PWM波以驱动各子模块开关器件;过流保护模块可实时采集各子模块故障信号,在系统故障时及时终止仿真运行以保护MMC变流器的开关器件。
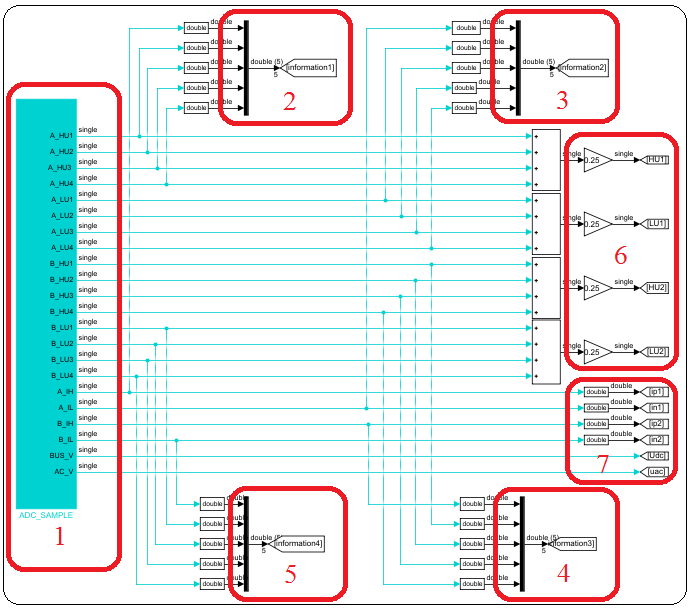
图2 研旭MMC电气参数测量系统
MMC电气参数测量系统如图2所示,其中子系统1读取RCP的AD转换器的数值并转换成MMC桥臂物理参数;子系统2、3分别为A相上、下桥臂电流和各子模块电压;子系统4、5分别为B相上、下桥臂电流和各子模块电压;子系统6为A、B相上、下桥臂子模块平均电压;子系统7为A、B相上、下桥臂电流、直流母线电压和交流输出电压。
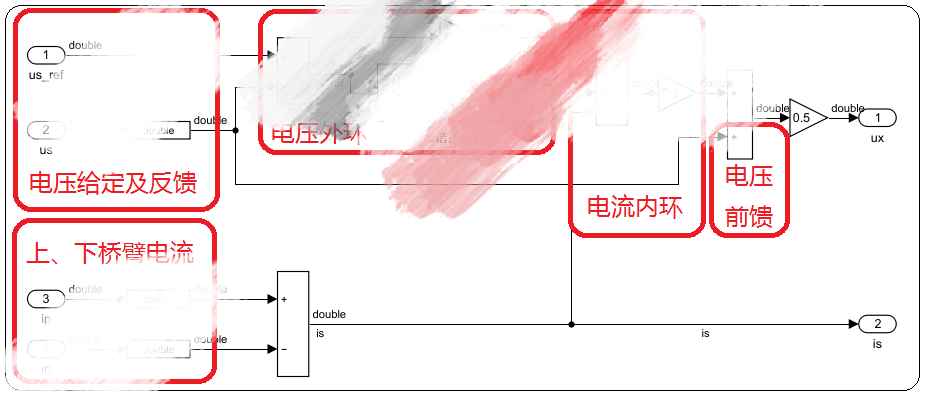
MMC差分电压控制模型如图3所示(详图可联系研旭商务人员索要)主要包括交流电压给定和反馈值、上、下桥臂电流、电压外环准谐振(PR)控制器、电流内环比例(P)控制器和交流电压前馈,电压外环采用准谐振(PR)控制器,可实现交流电压的无静差控制,电流内环采用纯比例(P)控制器,可提高电流控制的响应速度,电流反馈采用上、下桥臂电流作差值,并采用输出交流电压作为前馈量产生桥臂电压指令的差模分量,形成输出电压、电流双闭环控制结构,具有较高的响应速度和控制精度。
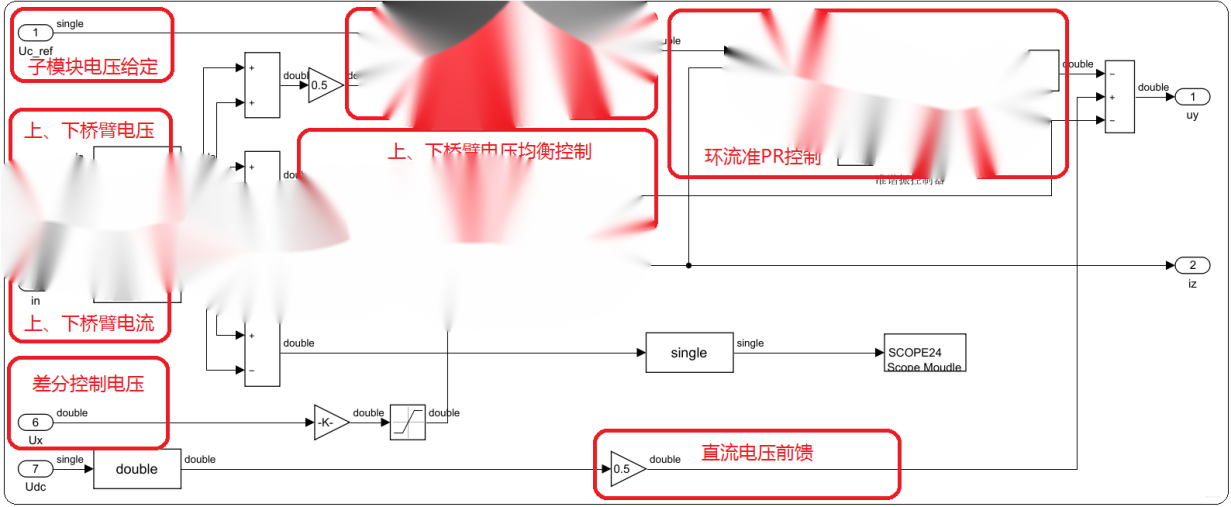
MMC环流控制模块如图4所示(详图可联系研旭商务人员索要)主要包括子模块电压PI控制器、上、下桥臂电压均衡P控制器以及环流准PR控制器,环流控制模块输入信号为子模块电压指令值、上、下桥臂模块电压平均值、上、下桥臂电流值、差分控制电压指令值和直流母线电压值,子模块电压控制器控制上、下桥臂电压平均值跟踪子模块电压指令值,环流准PR控制器按照子模块电压控制器的输出指令控制上、下桥臂的环流以维持上、下桥臂子模块电压稳定,上、下桥臂电压均衡控制器控制上、下桥臂电压均衡,并采用直流母线电压作为前馈量,将环流控制器和电压均衡控制器的输出以及直流母线前馈作代数和运算,产生桥臂电压指令的共模分量。
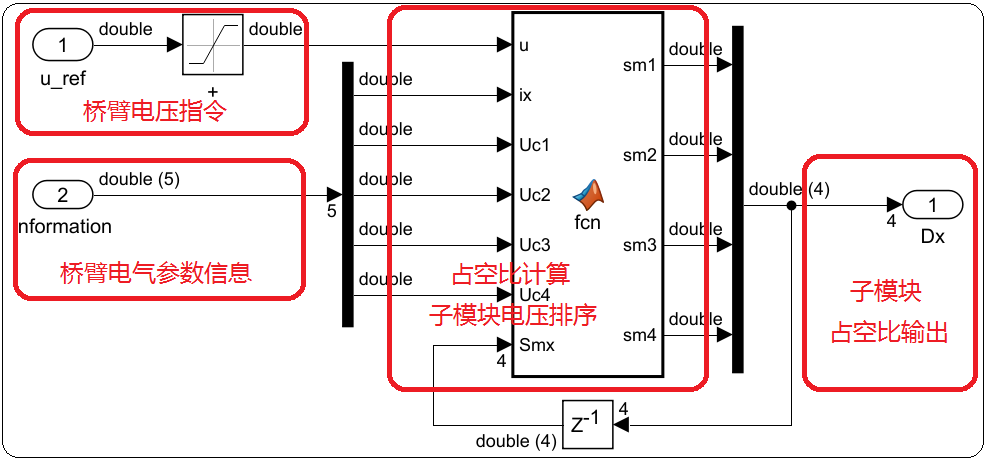
图5 MMC子模块均压控制和占空比计算
MMC子模块均压控制和占空比计算如图5所示,其输入信号为桥臂子模块电压指令值和桥臂电气参数信息(包括桥臂电流和各子模块电压),该计算模块在对桥臂子模块电压排序的基础上根据桥臂电流实时计算各子模块占空比,以实现桥臂子模块电压均衡控制,其输出的占空比数目为N(本仿真系统N=4)。

图6上、下桥臂 PWM波发生器
上、下桥臂PWM波发生器如图6所示,其输入信号为上、下桥臂占空比,占空比数目因桥臂子模块数目N而异(本仿真系统N=4),PWM波发生器可根据给定的占空比数值生成指定占空比、频率和相位的PWM波,并发送至各桥臂子模块的开关器件实现子模块的开关控制。
二、MMC系统实物控制波形
测试环境:
1、SP6000原型控制器
2、View6000在线实时监控系统
3、研旭YXPHM-MMC500功率模组(16模块,单相4桥臂,单桥臂4模块)
4、可编程直流电源、变压器及三相电网
5、直流输入780V,输出交流有效值230V 50Hz
6、控制频率5kHz
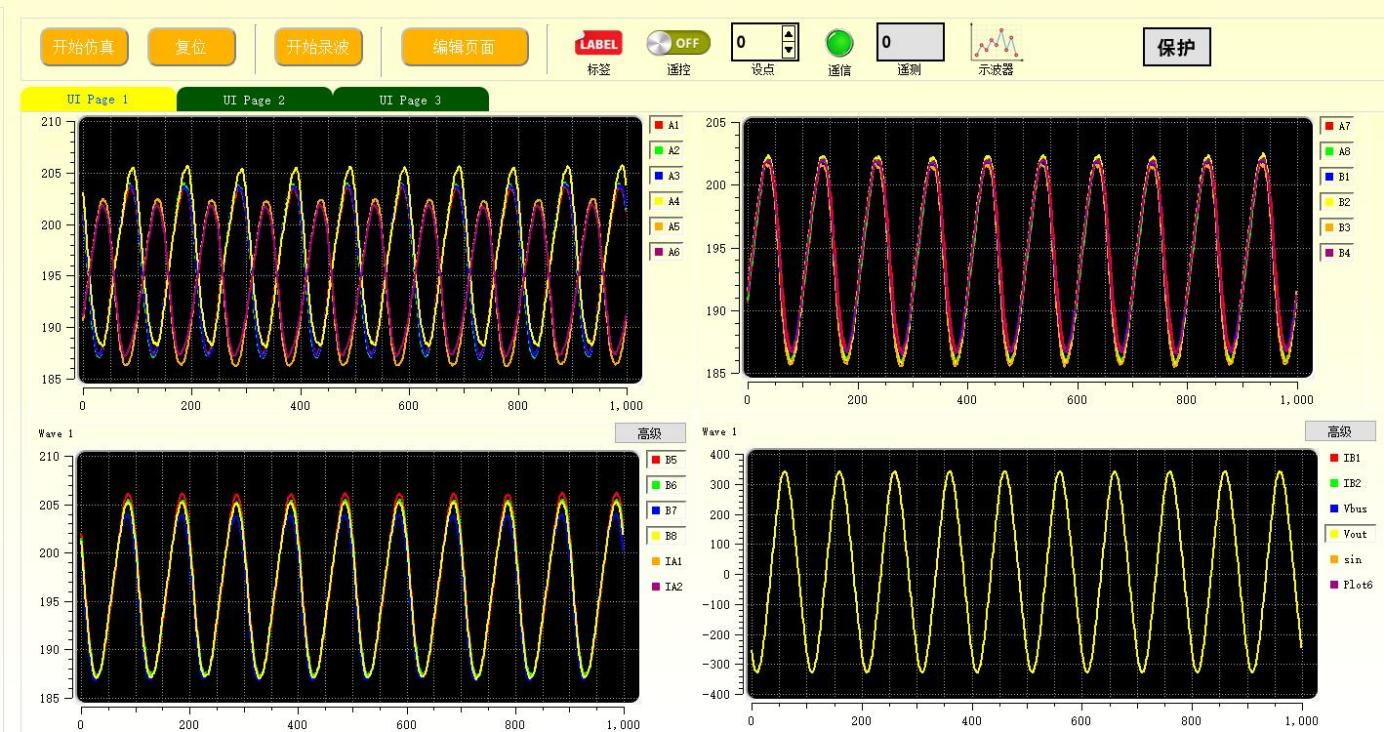
图7 MMC子模块电压波形
图7中,示波控件A1-A8,B1-B8为单相五电平16个模块直流电压实时波形,Vout是交流输出电压。
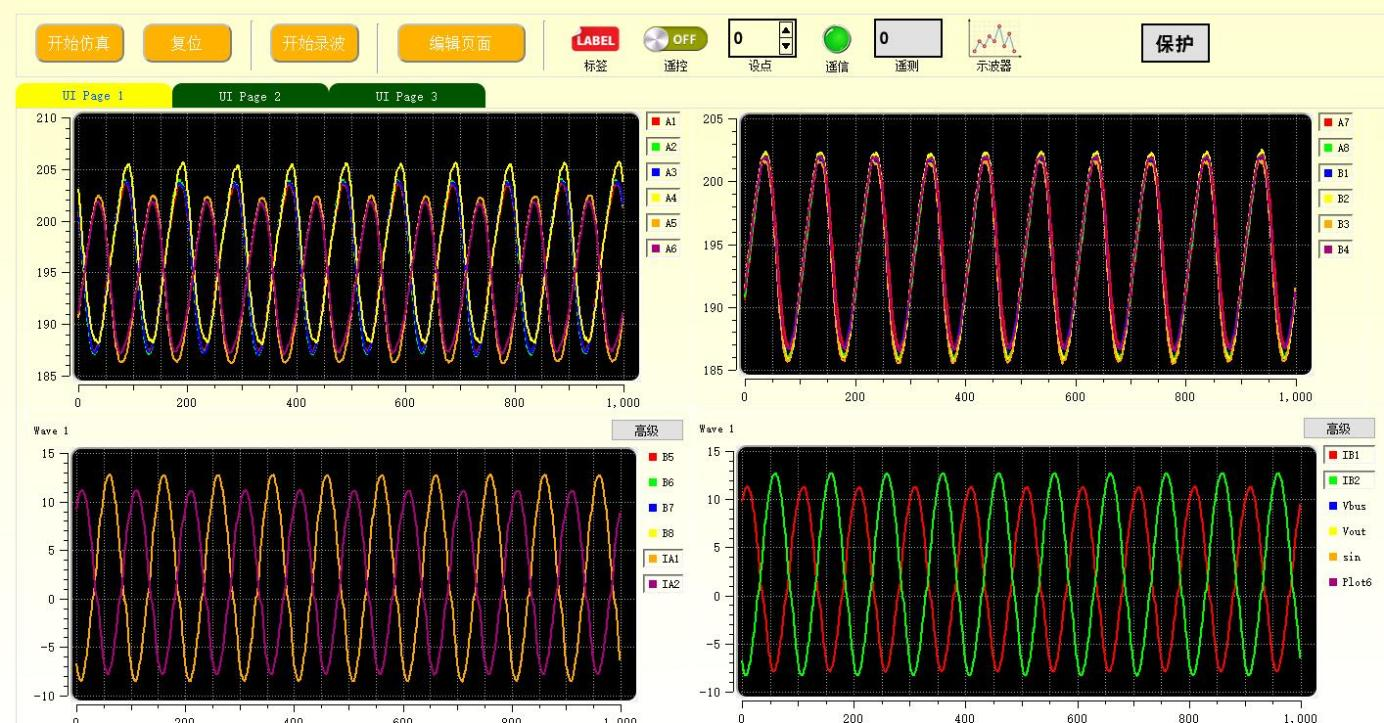
图8 MMC子模块电流波形
图8中,示波控件IA1-IA2、IB1-IB2为4个桥臂实时电流波形。
四、SP6000快速原型控制器

研旭公司推出的YXSPACE产品系列,能够将用户设计的图形化的高级语言编写的控制算法(Simulink)转换成DIDO、AIAO量,完成实际硬件控制。同时通过YX-VIEW6000监控组态软件,对控制器进行实时监控,从而完成模型的调试与验证。其基本控制框图如下所示:

控制算法模型一般采用Matlab中的Simulink工具搭建,通过研旭提供的simulink驱动库,将模型中的接口与硬件驱动接口绑定后,通过编译工具产生可执行文件,下载至SP6000仿真机中运行,对被控对象进行实际控制。
研旭SP6000仿真机配套软件YXSPACE-VIEW6000(以下简称VIEW6000)主要用于配置仿真机外设的工作模式,同时可以实时监测控制过程中的各类运行量,包括采集量、中间控制变量等。VIEW6000采用组态式架构,用户只需随意托拉控件就可以搭建属于自己的监控界面。用户可以借助6类控件,可以便捷的了解仿真机的控制过程。
研旭SP6000仿真机,采用插卡式结构,基本配置包含CPU板卡、2块模拟采集ADC板卡、模拟输出DAC板卡、数字输出DO板卡、数组输入DI板卡、两块脉宽调制PWM板卡、正交编码QEP/捕获CAP板卡。其板卡配置安装图如下:

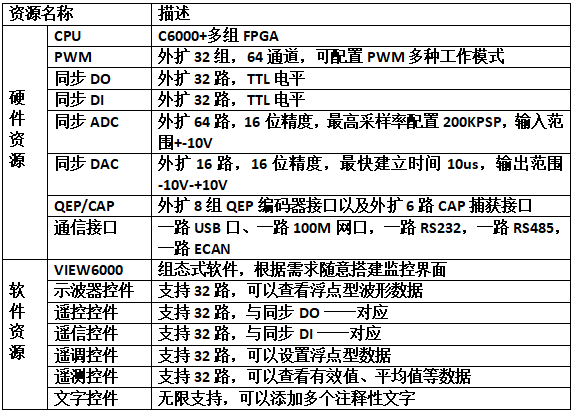
上位机监控软件VIEW6000软件,采用组态式交互界面,方便用户灵活、方便的查看仿真机的工作信息。


推广经理
微信公众号





